Question 6: Does the tension in the string of a swinging pendulum do any work? Explain.
ANSWER
Work done by a force is given by  .
. =FdcosΘ
Where is the displacement of the body as a result of the applied force and θ is the angle between and .
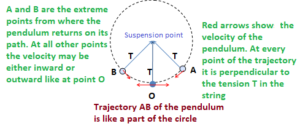
Now, the tension in the string acts upward and the velocity of the bob of the pendulum is always along the tangent to the path of the pendulum. So the angle between the tension T and displacement d is always 90°. Applying the above equation,
=FdcosΘ
Where is the displacement of the body as a result of the applied force and θ is the angle between and .
Now, the tension in the string acts upward and the velocity of the bob of the pendulum is always along the tangent to the path of the pendulum. So the angle between the tension T and displacement d is always 90°. Applying the above equation,
| Did you know The path of the pendulum is like a part of the circle. Velocity of the bob is perpendicular to the centripetal force provided by the tension in the string. |
 |
Pingback:energy-of-the-burning-meteor – msa
Pingback:k-e-of-the-bullet – msa
Pingback:Conceptual Questions, Work and Energy … msa – msa
Pingback:index-sq-ch4-p11 – msa